
柔性导电水凝胶纤维由于其卓越的柔韧性和较高的灵敏度,在可穿戴电子设备中引起了广泛关注。然而,集出色的强度、拉伸性、抗冻性和宽线性传感范围于一体的柔性导电水凝胶纤维却鲜有报导。
近期,南京林业大学韩景泉教授团队采用微流控纺丝技术制备了具有优异机械性能、导电性和抗冻性能的TOCNs-CNTs/PVA-SA-TA水凝胶纤维,并将其应用于开发高性能柔性可穿戴传感器,展现出在智能纺织品和人机交互领域的广阔应用前景。相关研究以“High-toughness multifunctional conductive hydrogel fibers via microfluidic spinning for flexible strain sensor”为题目发表于期刊《Industrial Crops and Products》。
本文要点:
1、本研究通过简便的微流控纺丝技术制备了具有优异机械性能、导电性和抗冻性能的TEMPO氧化纤维素纳米纤维-碳纳米管/聚(乙烯醇)-海藻酸钠-单宁酸(TOCNs-CNTs/PVA-SA-TA,TCG)水凝胶纤维。
2、TOCNs不仅有助于CNTs的均匀分散,形成连通的导电网络,还可以充当纳米增强材料来强化基体。单宁酸通过与PVA和SA形成的双网络结构增强了TCG的机械韧性。
3、所制备的纤维表现出优异的机械性能,包括8.06MPa的拉伸强度和438%的断裂应变,以及在低温(低于-20℃)下的优异导电性(1.57S/m)和抗冻性能。
4、基于TCG的传感器具有宽检测范围(0-250%)、高灵敏度(250%应变下的应变系数=2.49)、快速响应时间(120ms)和出色的抗疲劳性(500次循环),成功用于检测人体运动,显示出在柔性可穿戴设备中应用的巨大潜力。
微流控纺丝技术在制备TCG水凝胶纤维中起到了哪些关键作用?
1、精确控制纤维直径:微流控纺丝技术能够通过调节喷丝孔径和纺丝速度,精确控制TCG水凝胶纤维的直径,从而影响其机械性能和传感灵敏度。
2、形成均匀的复合结构:该技术通过将TOCNs-CNTs分散液与PVA-SA-TA溶液结合,形成均匀的复合纺丝溶液,有助于构建结构均一的纤维,提高纤维的机械强度和电导率。
3、实现快速凝胶化:微流控纺丝过程中,核心溶液中的SA与外壳溶液中的Ca2+发生反应,迅速凝胶化形成初生纤维,这一步骤对于制备具有特定微观结构的TCG纤维至关重要。
TCG水凝胶纤维的抗冻性能是如何实现的,这对可穿戴设备有何意义?
TCG水凝胶纤维在制备过程中经历了浸泡在饱和NaCl溶液中的后处理步骤。NaCl的引入可以降低水的冰点,赋予水凝胶纤维良好的抗冻性。
NaCl的引入还可以通过“盐析”效应促进水凝胶分子链的缠结,从而进一步提高了纤维的机械强度。
文章指出,即使在-20°C的严寒环境下,TCG水凝胶纤维仍能保持稳定的电信号输出,并成功检测到人体运动。
这种出色的抗冻性能使得TCG基传感器能够在低温环境中正常工作,为在寒冷地区或冬季户外活动中的人体健康监测和运动检测提供了可能,扩展了可穿戴设备的应用范围。
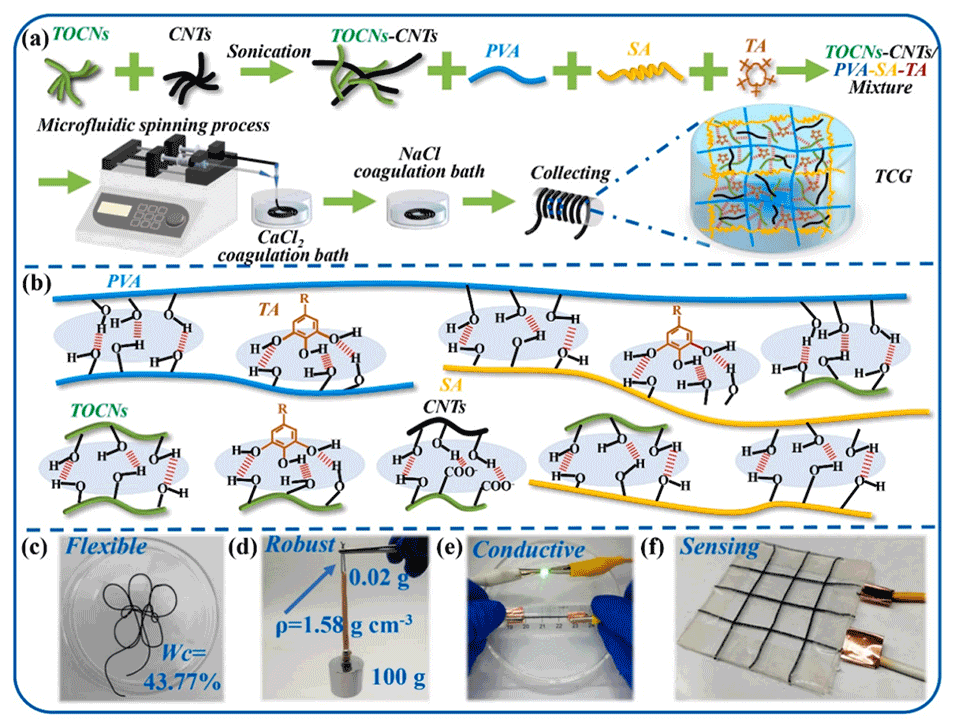
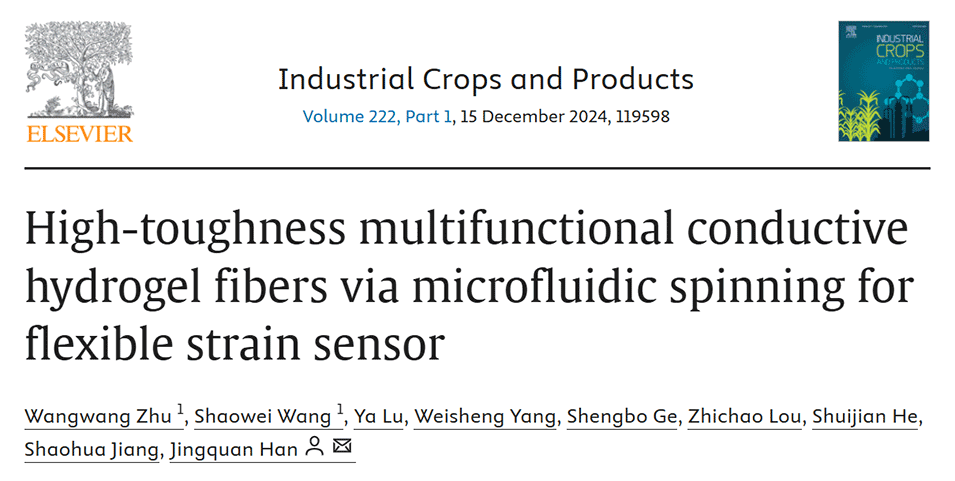
图1.(a)微流控纺丝制备过程示意图。(b)各组分之间的相互作用机理。制备的TCG水凝胶纤维具有(c)柔韧性、(d)机械坚固性、(e)导电性和(f)传感特性。
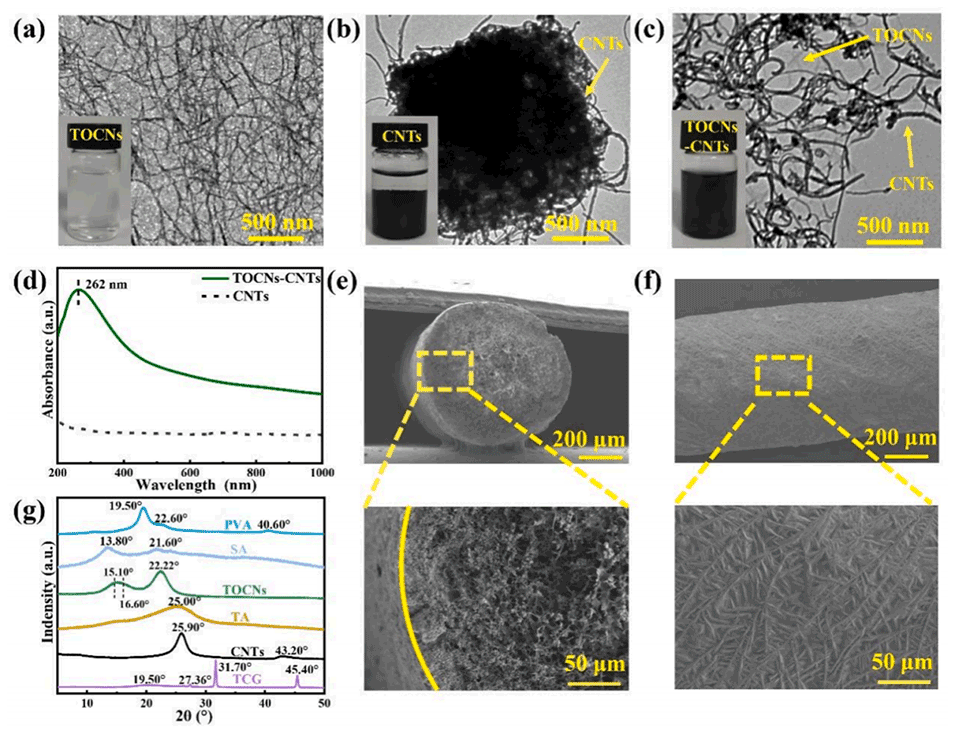
图2.(a)TOCNs、(b)原始CNTs和(c)TOCNs-CNTs纳米复合物的TEM图像。(d)纯CNTs和TOCNs-CNTs悬浮液的紫外-可见光谱。(e)TCG水凝胶微纤维的截面扫描电镜图像以及(f)低倍和高倍放大的表面扫描电镜图像。(g)TCG和各单组分的XRD光谱。
图3.(a)不同CNTs浓度的TCG水凝胶纤维在拉伸过程中的应力-应变曲线以及(b)相应的弹性模量和韧性。(c)TCG-3水凝胶纤维的连续十次加载-卸载循环。(d)TCG-3水凝胶纤维在十次拉伸过程中的能量耗散和效率。(e)TCG-3在不同应变(50%、100%、150%、200%和250%)下的循环拉伸加载-卸载曲线。(f)TCG-3在不同应变下拉伸的能量耗散和效率。
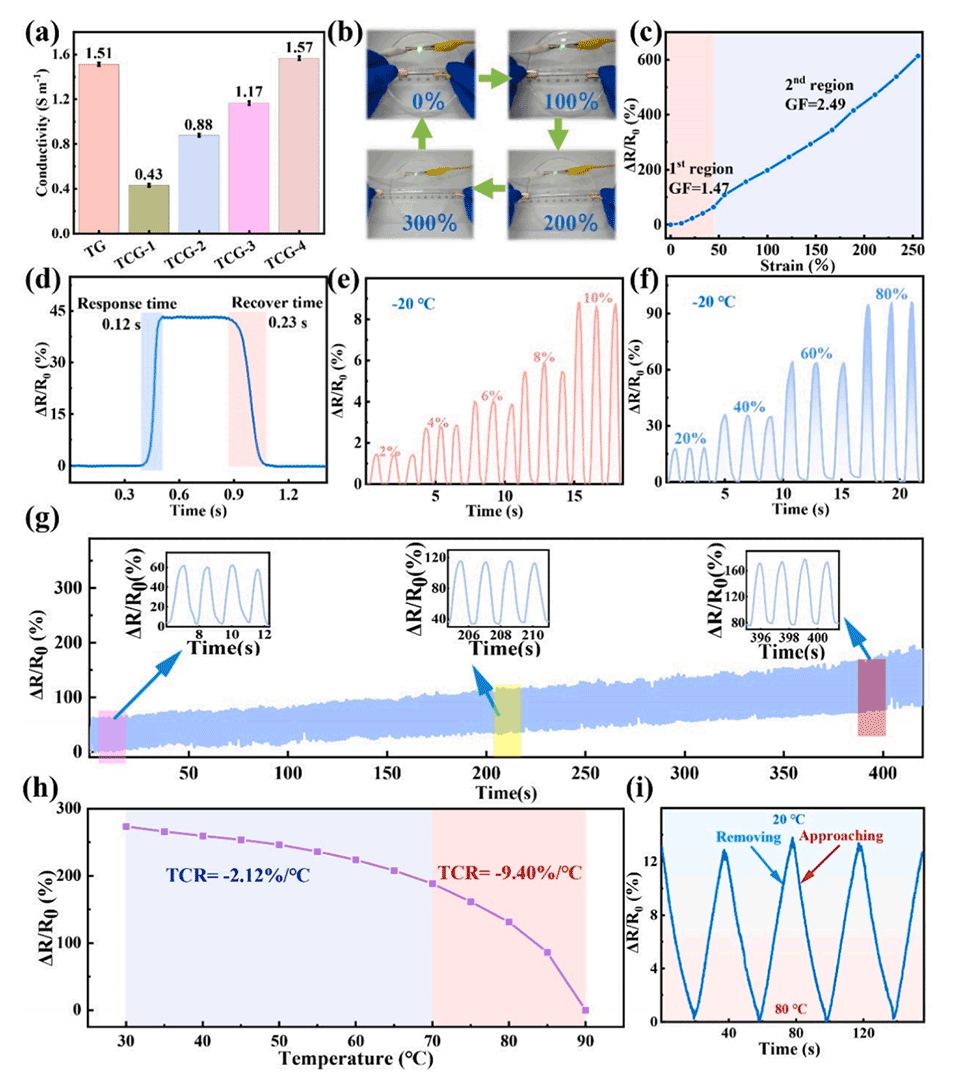
图4.(a)不同TCG水凝胶纤维的电导率。(b)TCG-3纤维在不同应变(0%、100%、200%和300%)下点亮LED灯泡的照片。(c)不同应变下TCG-3的GF值变化。(d)TCG-3的响应和恢复时间。(e)TCG-3传感器在-20℃、低应变下的相对电阻变化。(f)TCG-3传感器在-20℃、高应变下的相对电阻变化。(g)TCG-3传感器在-20℃、50%应变下经历500次拉伸加载-卸载循环的相对电阻变化。(h)30至90℃下的相对电阻变化曲线。(i)智能手套靠近和远离一杯80℃热水时的相对电阻变化曲线。
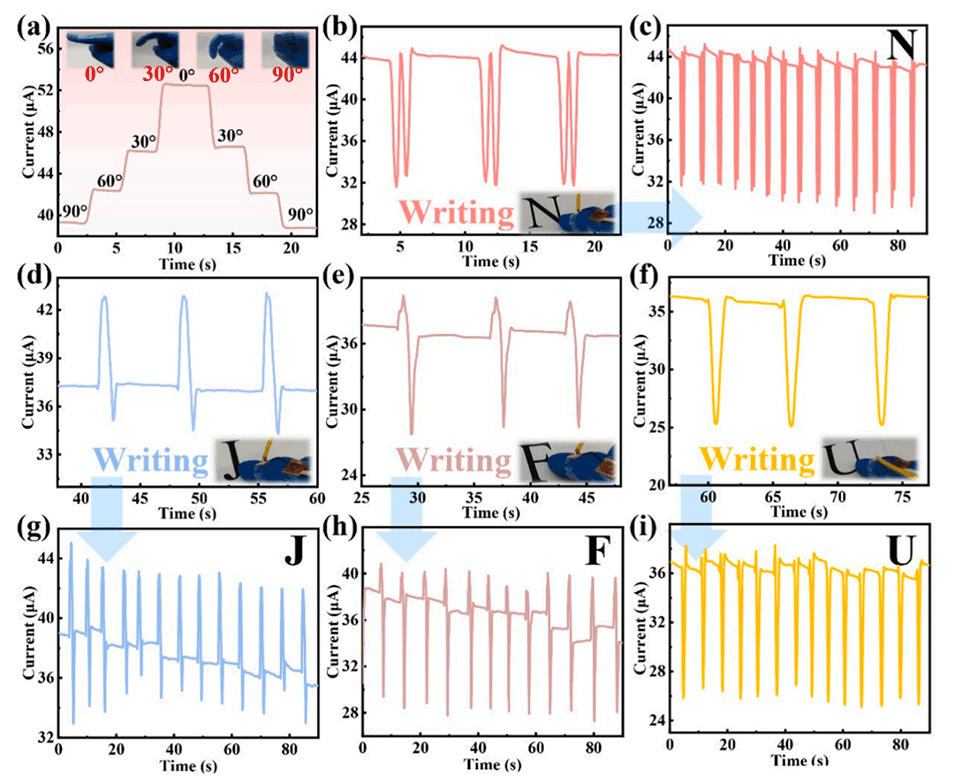
图5.(a)TCG水凝胶纤维不同角度弯曲示意图。附着在手指上的TCG传感器在书写不同字母时的电流变化:(b-c)“N”,(d)和(g)“J”,(e)和(h)“F”,(f)和(i)“U”。
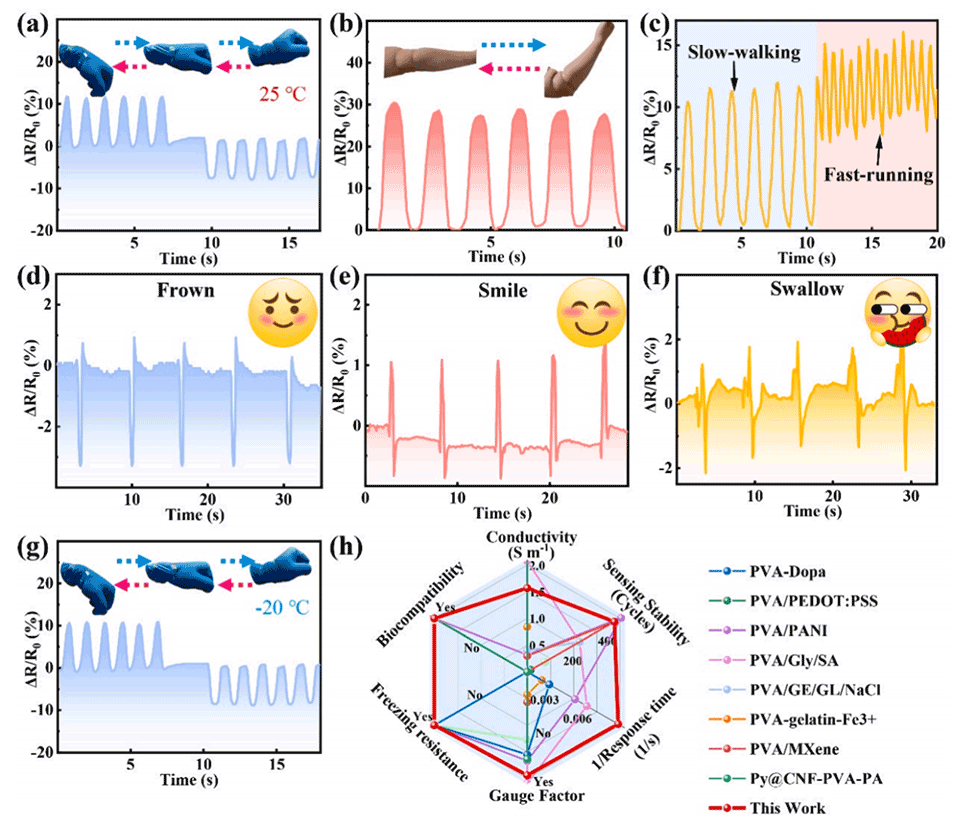
图6.使用TCG传感器检测不同的人体运动:(a)手腕弯曲,(b)肘部弯曲,(c)慢走和快跑,(d)皱眉,(e)微笑,(f)吞咽和(g)在-20℃下的手部弯曲。(h)TCG传感器与目前报道的传感器在导电性、传感稳定性、响应时间、应变系数、抗冻性和生物相容性方面的比较。
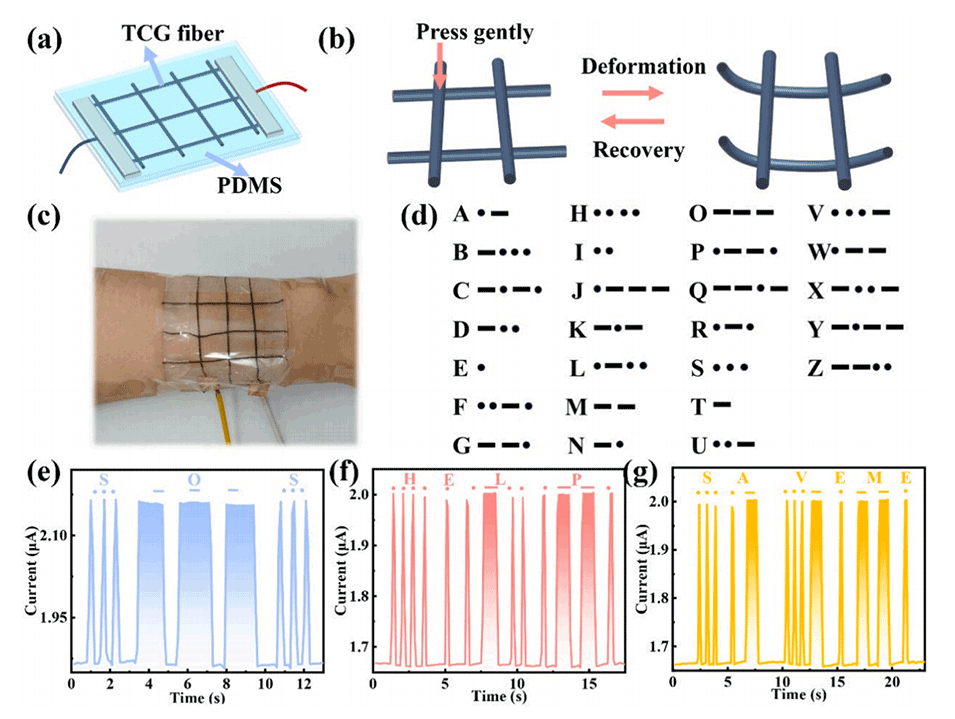
图7.(a)织物传感器示意图。(b)织物传感器在轻微压力变形过程中的变化示意图。(c)织物传感系统粘附在手臂表面的光学照片。(d)英文字母与摩尔斯电码的对应关系。织物传感系统根据摩尔斯电码发出不同的求救信号:(e)“SOS”、(f)“HELP”和(g)“SAVE ME”。
论文链接:https://doi.org/10.1016/j.indcrop.2024.119598