

导读:
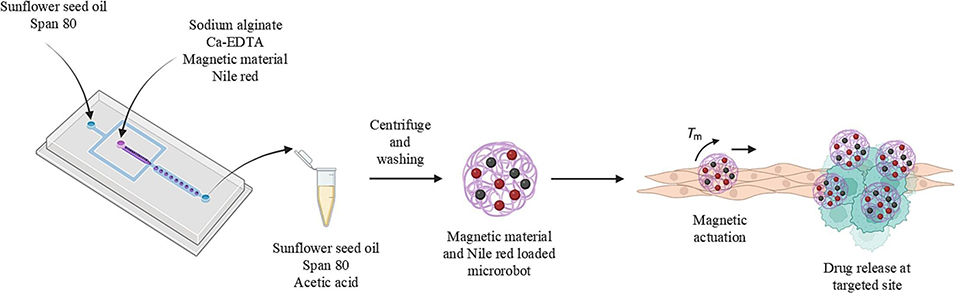
开发具有主动导航能力的微型机器人给药系统,相比传统的被动靶向和基于配体的靶向方法具有显著优势。这项研究通过微流控技术开发出一种高产率、可磁控的海藻酸钠软体微型机器人,专门用于医疗领域的精准药物输送。研究团队利用内部凝胶化策略克服了高粘度材料易堵塞通道的难题,成功制造出负载有FePt纳米颗粒或SPIONs磁性材料的球形微型机器人。实验证明,这种机器人比传统的硅基材料更柔软且具备变形能力,能够更好地适应复杂的生理环境。
通过荧光标记,科研人员实现了对机器人的实时光学追踪,并发现其在磁场驱动下展现出出色的定向运动和群体协作行为。此外,研究确定了HEPES缓冲液是维持机器人结构稳定性的最佳储存介质,为其未来的临床转化应用奠定了基础。相关成果以“Droplet-Based microfluidic production of soft alginate microrobots for magnetically targeted cargo delivery”为题目,发表于期刊《International Journal of Pharmaceutics》。
本文要点:
1. 创新生产工艺:液滴微流控与内部凝胶化
高产且可扩展:研究采用液滴微流控技术,相比于双光子聚合或3D打印等传统方法,实现了海藻酸盐微型机器人的高产量和规模化生产。
克服高粘度与堵塞:研究使用了高浓度(5%)的海藻酸钠溶液,并通过Ca-EDTA内部凝胶化策略成功解决了微通道堵塞和高粘度材料处理的难题。
2. 微型机器人的物理特性
尺寸与形态:生产出的微型机器人呈均匀的球形,平均粒径约为 40-42 μm。
卓越的柔软性:原子力显微镜(AFM)分析证实,这些海藻酸盐机器人的硬度远低于传统的二氧化硅微型机器人。这种高柔软性使其能更好地适应复杂的生理环境(如毛细血管),并显著降低对组织的机械损伤风险。
光学可追踪性:通过负载尼罗红(Nile red)荧光染料,实现了在生物环境下的实时光学追踪。
3. 磁驱动性能表现
研究对比了两种不同磁性材料负载后的运动效果:
FePt(铁铂)纳米颗粒:具有硬铁磁行为。在振荡磁场下表现出更强的定向推进能力和更高的移动速度,适合需要精准、长距离导航的任务。
SPIONs(超顺磁性氧化铁):在静态磁场下表现出快速的、集群式的集体运动,适用于局部药物扩散或生物膜破坏等需要群体协作的场景。
4. 物理稳定性与存储要求
介质敏感性:研究发现钙-海藻酸盐结构在含有氯化钠或柠檬酸钠的溶液(如PBS、TBS、柠檬酸缓冲液)中会发生离子交换或螯合作用,导致结构迅速崩解。
关键发现:HEPES缓冲液是唯一能使其保持结构完整性的介质,因此被确定为进行体外释放研究和长期存储的理想溶液。
5. 应用前景
该研究提供了一个可扩展、安全且可控的软体微型机器人平台。这种机器人集生物相容性、可降解性、柔软性和磁响应性于一体,在靶向给药、微创诊断以及未来复杂生物模型中的治疗应用方面具有巨大潜力。
文章指出,只有HEPES缓冲液能保持微型机器人结构稳定,主要原因是它不含会破坏海藻酸钙交联结构的成分。而其他缓冲液导致结构崩解,则是因为:
PBS 和 TBS:含有高浓度的钠离子 (Na+)。钠离子会与维持海藻酸盐网络结构的二价钙离子 (Ca2+) 发生离子交换,将钙离子置换出来,从而削弱了关键的“蛋盒”结构,导致凝胶解体。
柠檬酸盐缓冲液:其中的柠檬酸根是强效的螯合剂,能直接“抢夺”并束缚住交联网络的钙离子,形成可溶的柠檬酸钙复合物,从而迅速破坏结构。
HEPES 缓冲液:作为一种两性离子有机缓冲剂,它的配方里既没有高浓度的一价阳离子(如Na+),也没有螯合剂。这使得它无法破坏钙离子交联,因此成为实验中唯一能让微型机器人保持结构完整(至少三天)的介质。
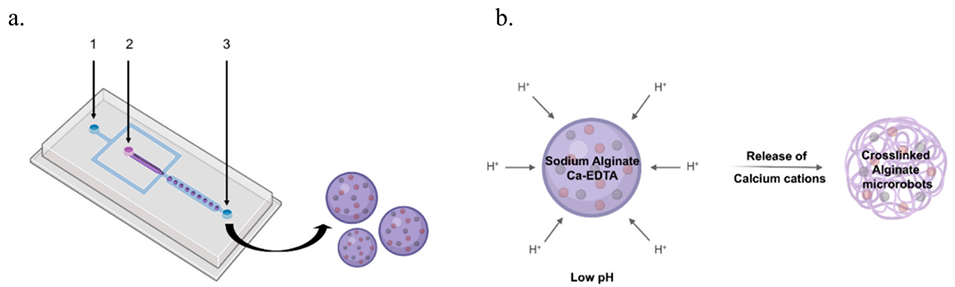
图1. a) 示意图展示了流体聚焦芯片的设计,数字表示通道入口(1和2)和出口(3)。b)示意图描述了被称为内部凝胶化的交联机制。

图2. 用于驱动负载FePt纳米颗粒微型机器人的定制五线圈电磁装置。
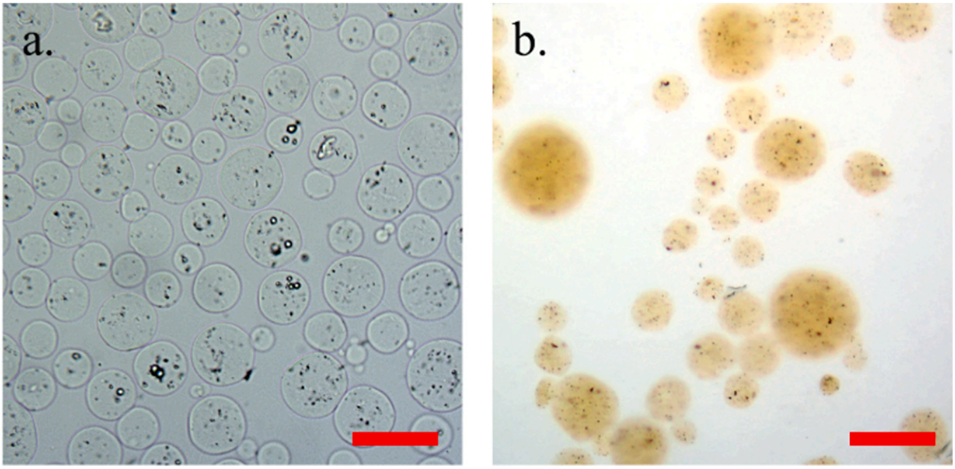
图3. a) 负载FePt纳米颗粒的微型机器人的光学显微镜图像。比例尺:100μm。b) 负载SPIONs的微型机器人的光学显微镜图像。比例尺:100μm。
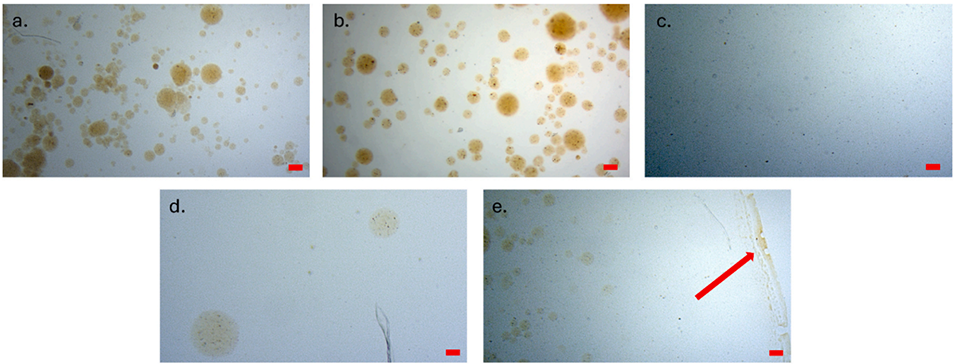
图4. 负载SPIONs的微型机器人在不同环境下的显微图像:a) 在HEPES中;b) 在HEPES中放置三天后;c) 在柠檬酸缓冲液中;d) 在PBS中;e) 在TBS中。比例尺:100μm。
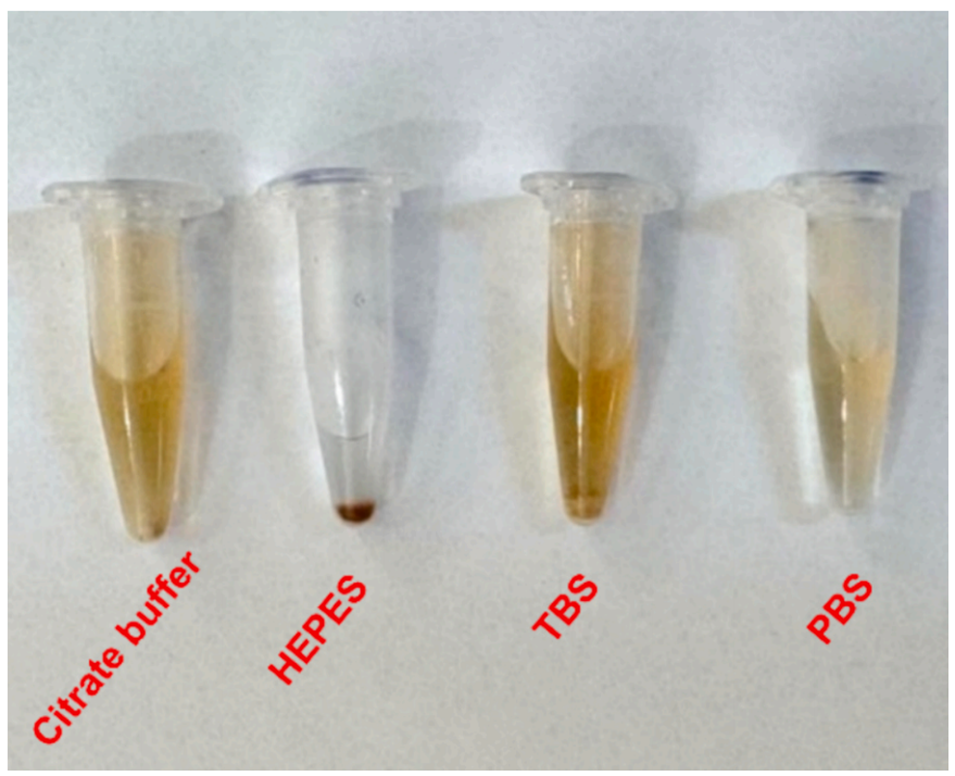
图5. 对不同缓冲溶液中微型机器人宏观外观的直观检查。
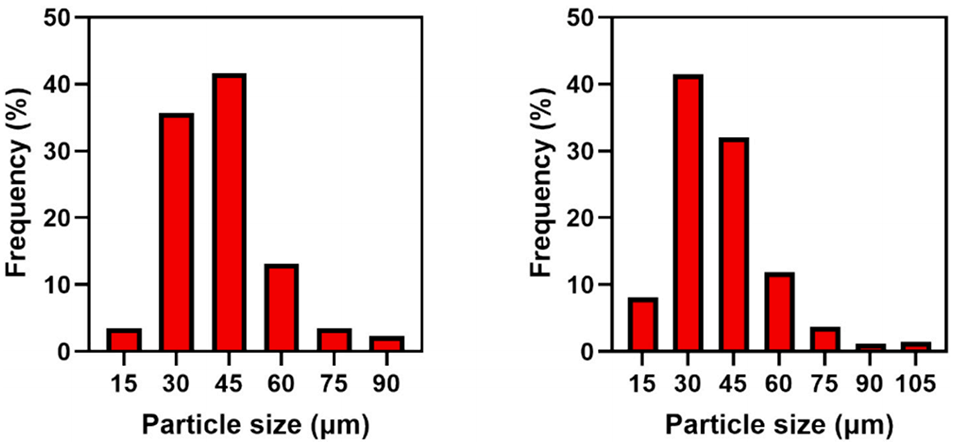
图6. 负载FePt纳米颗粒(左侧)和负载SPIONs(右侧)微型机器人的颗粒尺寸分布直方图。
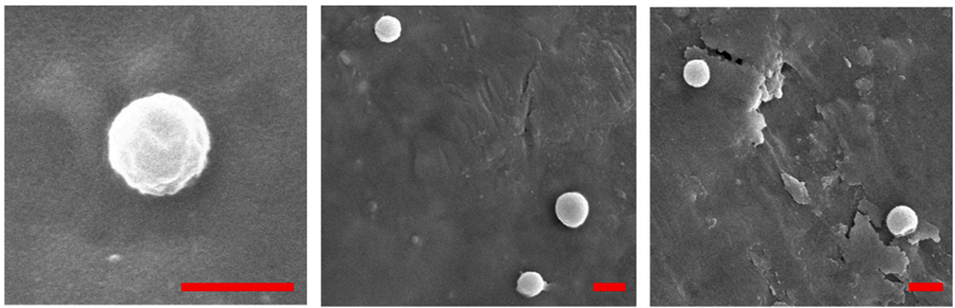
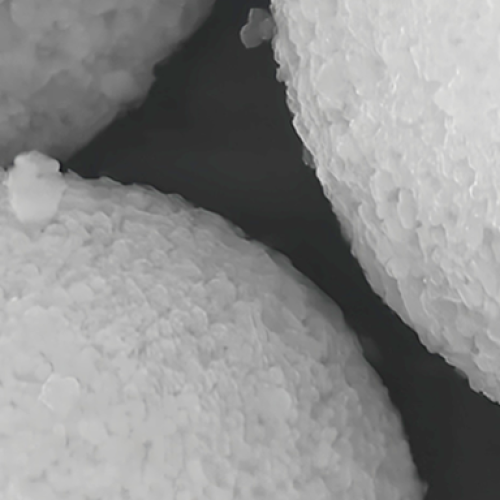
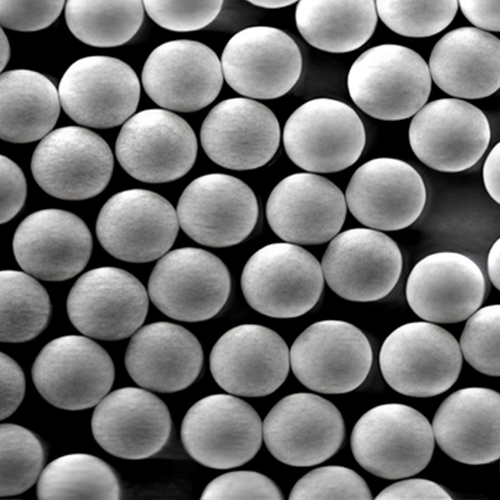
图7. 微型机器人的扫描电子显微镜(SEM)图像。比例尺:1μm。
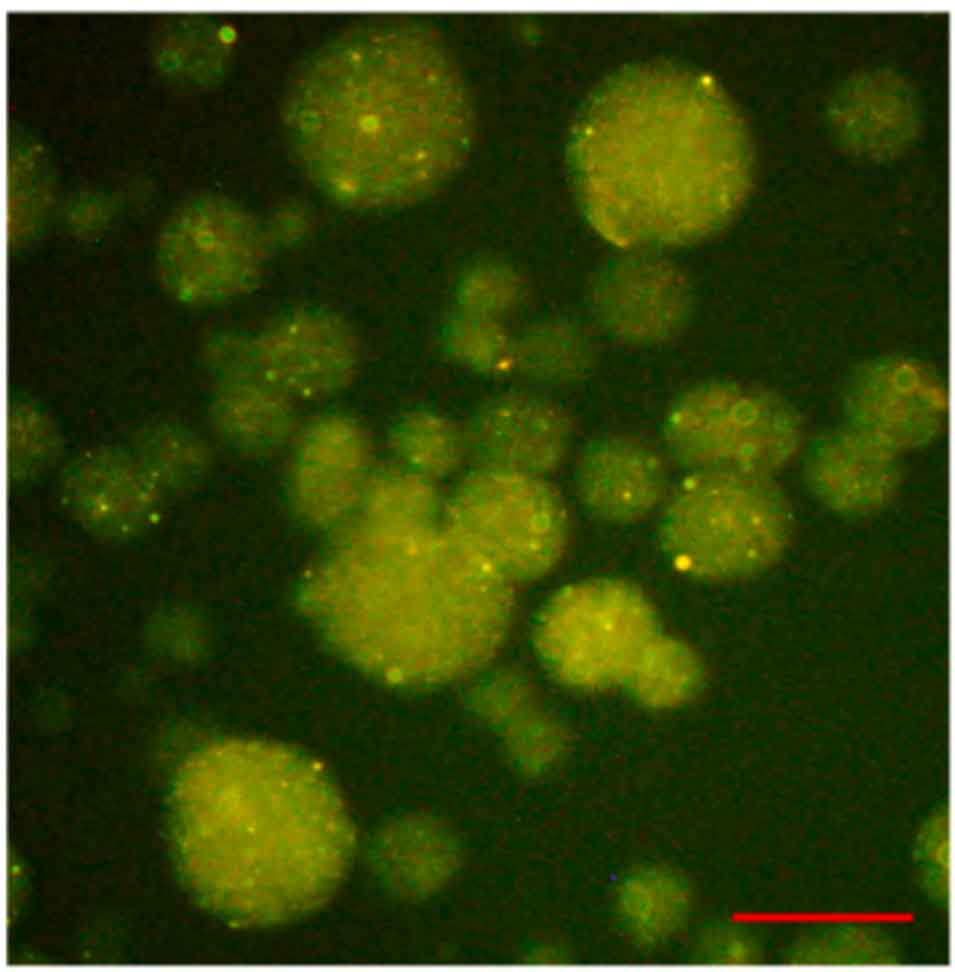
图8. 微型机器人的荧光显微镜图像。比例尺:100μm。
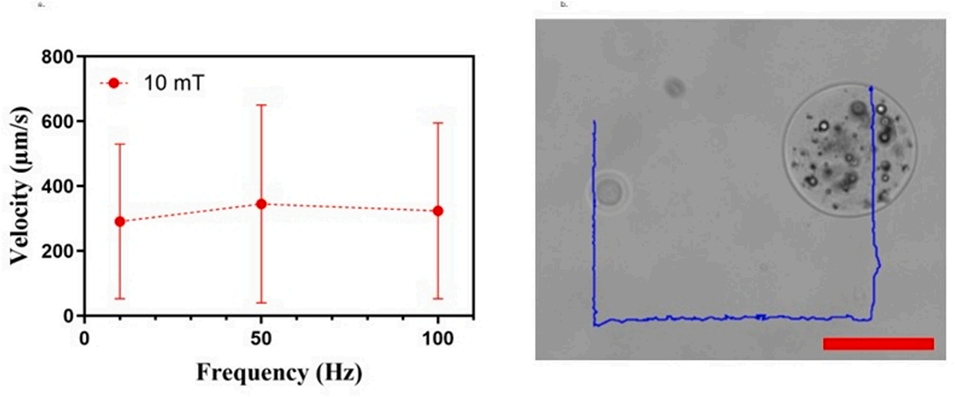
图9. a) 10mT磁场下负载FePt的海藻酸盐微型机器人的速度图。b) 单个负载FePt的海藻酸盐微型机器人在10mT磁场引导下追踪“U”形轨迹的时间序列图。比例尺:50μm。

图10. 负载SPIONs的海藻酸盐微型机器人根据永久磁铁方向进行的集体运动。
论文链接:https://doi.org/10.1016/j.ijpharm.2025.126170
(本文仅供参考学习及传递微流控研究成果,版权归原作者所有,如侵犯权益,请联系删除)