
研究背景
1、微流控技术是化学合成、生物分析、材料组装的重要平台,具备高通量、低样品消耗、精准流体控制的核心优势,但微通道内流体多处于层流流态,混合依赖分子扩散,效率极低且严重限制组装结构的可控性。
2、现有微流控混合策略分为外能驱动的主动混合和通道几何调控的被动混合,其中利用流体力学不稳定性诱导涡旋的方法因无需外场、易集成受到关注,但相关研究多聚焦单驱动因素,对多驱动力协同下的涡旋演化与混合的系统研究匮乏。
3、前期研究证实:非对称微腔层流可打破非手性分子对称性、涡旋场能促进手性信号传递,微液滴受限体系可加速超分子组装,且手性可通过界面实现传递与放大,为本次研究奠定理论基础。

导读
近期,大连理工大学陶胜洋团队提出一种基于流速与界面张力双驱动力协同调控的微流控方法,通过该方法可调控微液滴内部的涡旋场,进而实现对超分子手性组装体光学信号的调控。研究结合微颗粒图像测速技术(μ-PIV)与定量混合分析,阐明了涡旋的动态演化规律,还系统探究了涡旋特征与混合性能之间的关联。
该团队选取四 (4 - 磺基苯基) 卟啉(TPPS4)与苯乙胺(PEA)作为超分子共组装体系,对涡旋场作用下微液滴内部的手性信号传递过程展开了研究。在组分与浓度完全一致的条件下,微液滴体系中制备的 TPPS4-PEA 共组装体,相较于传统间歇式反应釜中合成的样品,展现出显著增强且更为稳定的圆二色性(CD)信号,同时还成功实现了手性信号从连续相到分散相的液 - 液界面传递。相关研究以“Interfacial Chirality Transfer Induced by Vortices inside Microdroplets”为题目,发表在期刊《Small Methods》上。
本文要点:
1、该研究提出了一种基于流速和界面张力双驱动力协同调控微液滴内部涡旋流的微流控策略,探究了涡旋场对超分子手性组装及手性信号传递的调控机制,为受限环境中手性光学信号调制提供了新方法。
2、研究采用同轴毛细管微流控芯片生成微液滴,通过调控两种分散相的流速差(ΔQ)和界面张力差(Δγ),诱导有序的马兰戈尼对流和剪切流,实现了微液滴内从层流到涡旋流的转变。
3、结合微颗粒图像测速技术(μ-PIV)和流体力学分析,定量解析了连续相 - 分散相、分散相间的剪切力,以及界面张力、流体压力对涡旋形成和演化的作用,发现双驱动力协同下的剪切循环与马兰戈尼界面流可显著增强液滴内混合效率,且界面张力梯度驱动的混合呈持续提升趋势,流速差驱动的混合则存在最优比值窗口。
4、以四 (4 - 磺酸钠苯基) 卟啉(TPPS₄)和苯乙胺(PEA)为超分子共组装对,研究了涡旋场对手性组装的影响:与传统磁力搅拌相比,微液滴涡旋场中形成的组装体展现出显著增强且近乎镜像的圆二色性(CD)信号,证实涡旋流可有效促进手性放大和对映选择性超分子组装;将手性诱导剂 PEA 置于连续相时,仅在强涡旋条件下实现了手性信号从连续相到分散相的跨界面传递与放大,而层流条件下几乎无明显 CD 响应,磁力搅拌下的信号则弱且不稳定。
5、该研究阐明了双驱动力调控微液滴涡旋、混合效率与超分子手性组装的关联机制,突破了层流条件下扩散主导的混合限制,提升了界面传质和内部循环效率,为微液滴反应器中的高效混合和手性可控组装提供了理论基础,在手性传感、药物合成、超分子材料工程等领域具有广泛应用潜力。
该研究提出的微流控策略相较于传统微流控涡旋调控方法,核心创新点是什么?
一是突破了传统微流控涡旋调控多聚焦单驱动力的局限,提出流速差 (ΔQ)和界面张力差 (Δγ)双驱动力协同调控策略,实现了微液滴内涡旋场的精准、可控调制;
二是将该双驱动力涡旋调控策略与超分子手性组装结合,首次系统阐明了涡旋场对液 - 液界面手性信号传递的调控机制,而非仅关注滴内混合或组装;
三是利用微液滴的受限环境,结合 μ-PIV 实现流场可视化与水动力定量分析,明确了双驱动力调控涡旋形成的定量规律,为策略的实际应用提供了理论支撑。
该研究设计的微流控芯片在结构上有何特点,为何该结构能实现流速差(ΔQ)和界面张力差(Δγ)双驱动力的独立调控?
研究采用同轴毛细管微流控芯片,由锥形 θ 型毛细管和圆柱形毛细管组成,是实现双驱动力独立调控的核心结构设计;其中圆柱形毛细管单独通入连续相(C),θ 型毛细管的两个独立通道分别通入两种分散相(D1、D2)。
该结构的技术优势体现在:①D1、D2 的流路完全独立,可通过多通道压力控制器分别调节二者的流速,实现流速差(ΔQ)的精准且独立调控;②可向两个分散相通道分别注入不同组成的流体(如 D1 为去离子水、D2 为不同浓度乙醇水),通过改变流体组分调控各自与连续相、相互之间的界面张力,实现界面张力差(Δγ)的独立调控;③θ 型毛细管的锥形出口使 D1、D2 在液滴破裂前保持空间相邻,为双驱动力协同作用于液滴内部流场提供了结构基础。
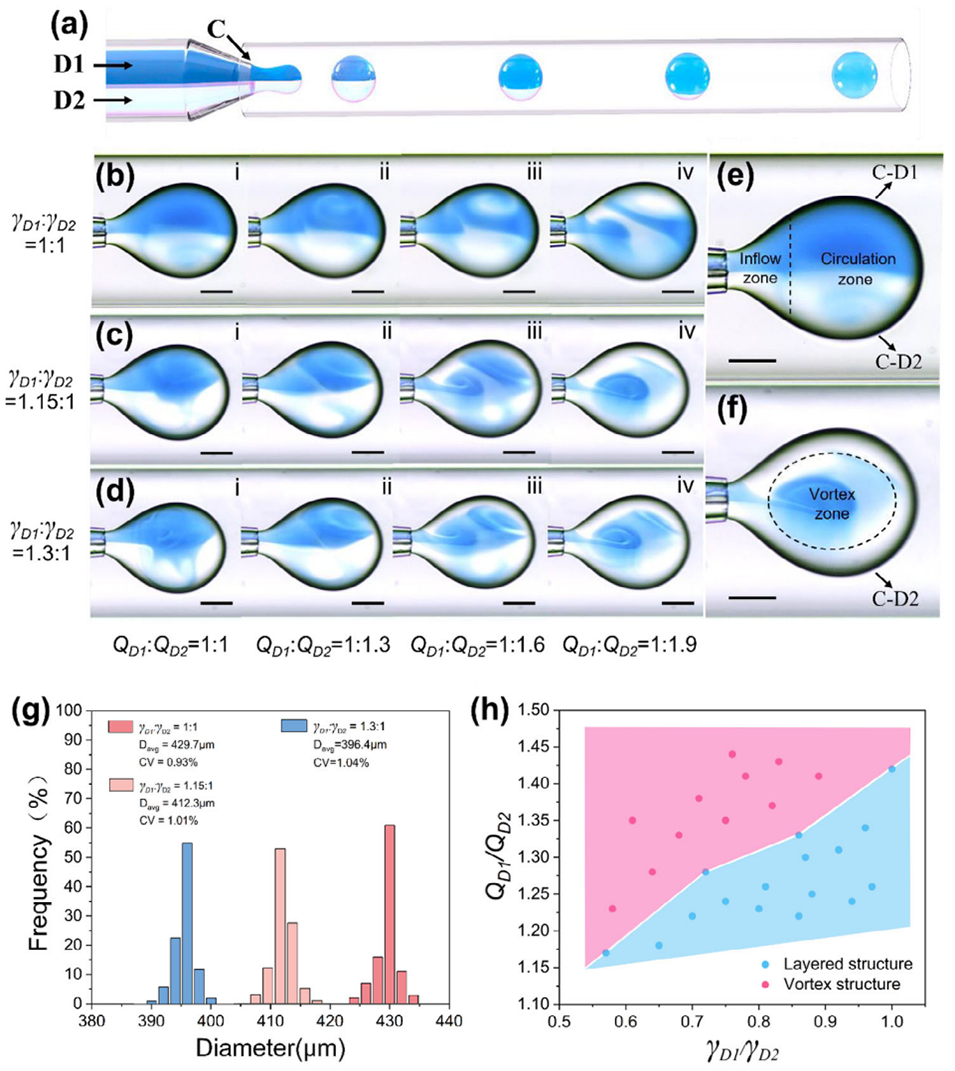
图1 (a) 用于生成液滴的微流控芯片示意图;(b) 界面张力差可忽略(<0.5%)时,随分散相流速差逐步增大记录的液滴形成过程;(c, d) 随分散相间界面张力差逐渐增大记录的液滴形成过程;(e) 具有层状内部结构的代表性液滴;(f) 具有环状内部分布的代表性液滴(添加亚甲基蓝以提高对比度)。所有图像均由高速彩色相机实时采集,比例尺:100 微米;(g) 液滴平均粒径分布及变异系数;(h) 流速比和界面张力比对液滴内部流态的影响。
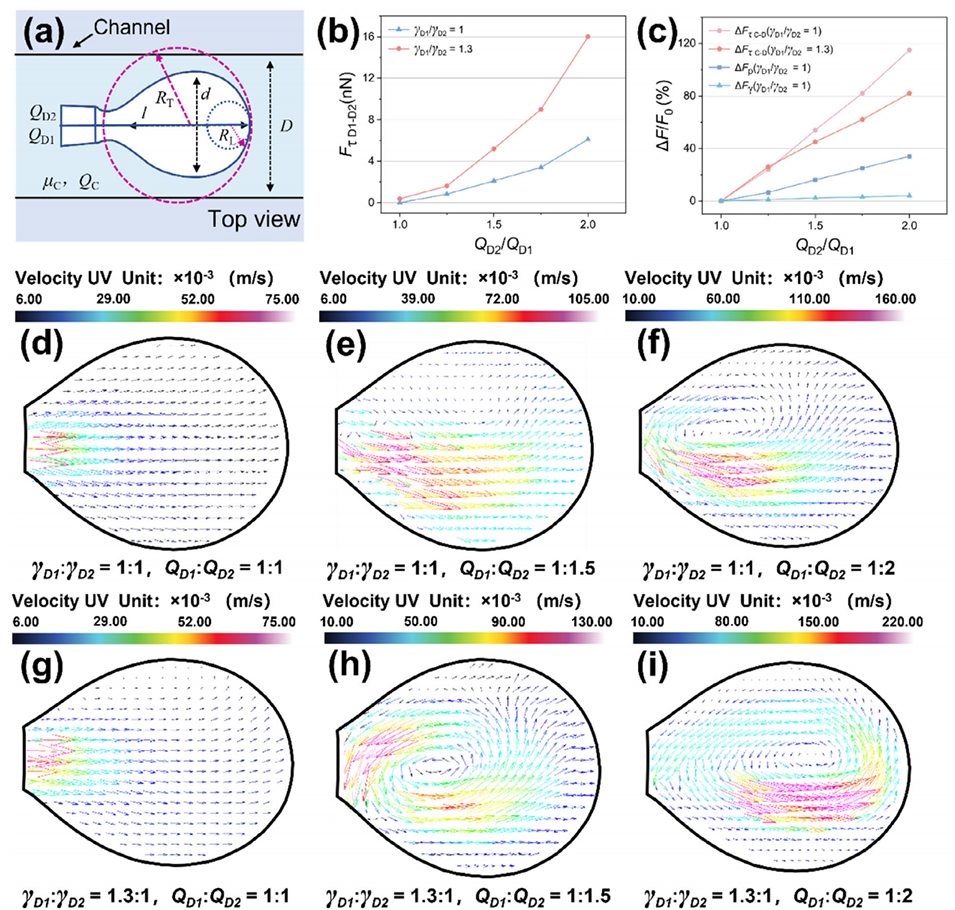
图2 微液滴内部涡旋流的演化过程。结合液滴受力分析与微颗粒图像测速技术(μ-PIV)表征,阐明不同驱动条件下的流型转变:(a) 液滴几何结构与受力平衡示意图;(b) 不同界面张力差(Δγ)下,分散相间剪切力(FτD1−D2)随流速差(ΔQ)的变化规律;(c) 连续相 - 分散相间剪切力(FτC−D)、流体压力(Fp)和界面张力(Fγ)的相对增幅随流速差的变化关系;(d) 无流速差和界面张力差时的层流结构;(e) 流速比为 1:1.5 时的涡旋流结构;(f) 流速比为 1:2 时的涡旋流结构;(g) 界面张力比为 1.3:1 时的对流主导型结构;(h) 流速比 1:1.5 与界面张力比 1.3:1 协同驱动下形成的涡旋流结构;(i) 流速比 1:2 与界面张力比 1.3:1 协同驱动下形成的强涡旋流结构。
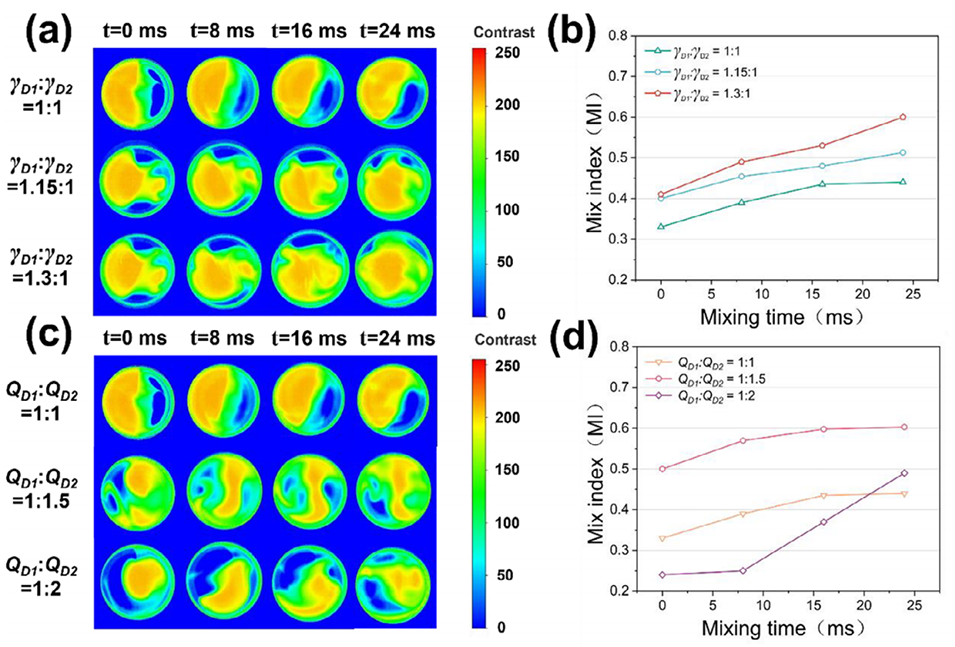
图3 基于高速相机图像提取的饱和度值,评价不同流场条件下液滴内的混合效率:(a) 分散相流速比为 1:1 时,界面张力比分别为 1:1、1:1.15 和 1:1.3 的液滴混合状态;(b) 表观混合指数随界面张力差的时间演化规律;(c) 分散相界面张力比为 1:1 时,流速比分别为 1:1、1:1.5 和 1:2 的液滴混合状态;(d) 表观混合指数随流速差的时间演化规律。
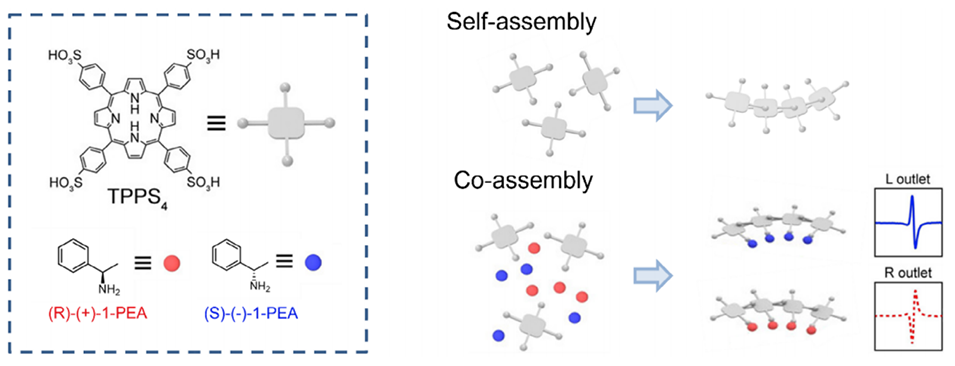
图4 超分子手性组装示意图,包含两种组装路径:TPPS4 的自组装路径,以及 TPPS4 与 PEA的共组装路径。
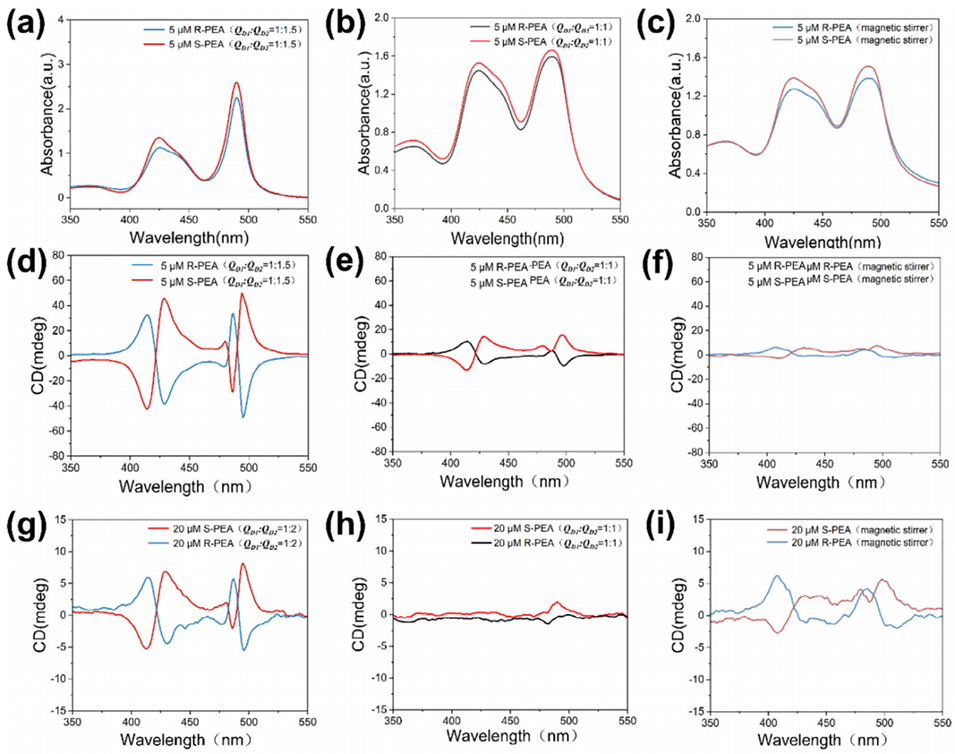
图5 TPPS4-PEA 超分子共组装体的紫外 - 可见吸收光谱与圆二色光谱:(a)-(c) PEA 存在于分散相时,不同组装条件下样品的紫外 - 可见吸收光谱 ——(a) 微液滴涡旋条件下的组装产物(样品 1);(b) 微液滴层流条件下的组装产物(样品 2);(c) 磁力搅拌条件下的组装产物(样品 3);(d)-(f) 对应组装产物的圆二色光谱 ——(d) 样品 1;(e) 样品 2;(f) 样品 3;(g)-(i) PEA 存在于连续相时,不同组装条件下样品的圆二色光谱 ——(g) 微液滴涡旋条件下的组装产物(样品 4);(h) 微液滴层流条件下的组装产物(样品 5);(i) 磁力搅拌条件下的组装产物(样品 6)。
论文链接:https://doi.org/10.1002/smtd.70643
(本文仅供参考学习及传递微流控研究成果,版权归原作者所有,如侵犯权益,请联系删除)